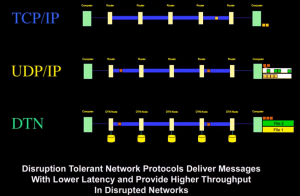
Many people new to InterPlanetary Networking are surprised to discover that DTN is also considered effective for many terrestrial use cases. That’s because the same kind of constraints exist in many networking environments right here on planet earth. These primarily include disruptions and delays—or perhaps even the absence of traditional Internet infrastructure that would make network communications via TCP/IP unfeasible or prohibitively expensive.
It’s not too difficult to envision some of those environments. Some constraints are inherent in the communication environment itself:
Like water as a communication medium. RF waves do not propagate well, but sound waves do, which are incredibly slow and whose speed varies unpredictably with the density of the water column.
Or think of underground applications like mining. Cable can be expensive to lay and subject to disruption through unintentional damage by mining equipment. RF does not penetrate the earth.
First responders searching through rubble are subject to unpredictable disruptions caused by loss of LOS with wireless signals.
Battlefield sensors cannot maintain constant RF contact for security reasons.
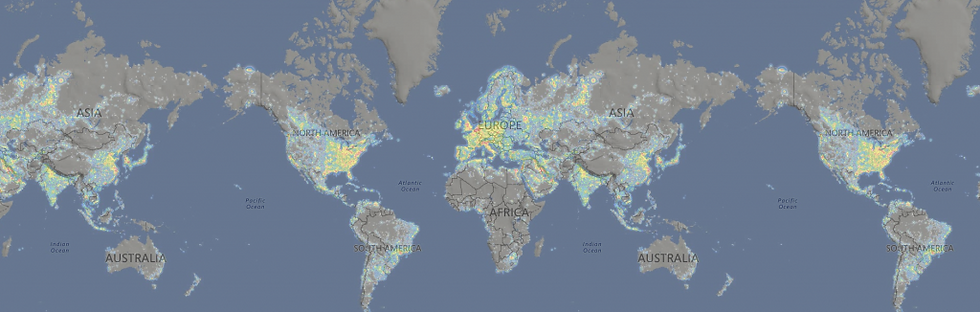
Finally, many regions that would benefit from Internet services find them unavailable (or prohibitively expensive) simply because they are not located where traditional Internet infrastructure exists. A look at any light pollution map shows you how much of the world does not have ready access to traditional Internet infrastructure.
Examples of experimental implementations of DTN to overcome these constraints include:
Providing basic Internet services to reindeer herders in the Arctic Circle in Sweden.
Monitoring air quality in a karst cave in Romania.
Monitoring the cardiac health of first responders during emergency operations
Providing basic Internet services to remote villages in Africa that had no access to traditional network infrastructure
An area of particular interest to the DTN community is the Internet of Things (IoT), where communication is primarily amongst things and not people: sensors in buildings, roadways, on farms and even in our bodies. Because of the mobility of many of these Things, and limitations in power and signal strength, continuous end-to-end connectivity is either not achievable at all, or not maintainable. Since DTN assumes that such continuity does not exist, it can perform a valuable function in the world of IoT (sometimes called the “DTN of Things”).
Our next blog will dive into DTN’s potential role in IoT in more detail.
This blog is a product of the usual suspects: Scott Burleigh (NASA/JPL); Keith Scott (Mitre Corp./CCSDS and Mike Snell (IPNSIG)